1/55 装甲ロボット兵シグマ製作記
(2/4)

今度はシグマの「脚」を作っていきます。
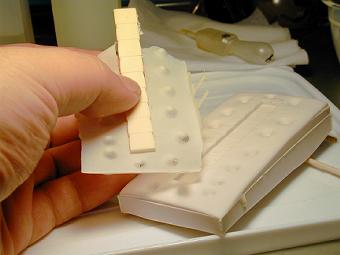
設計図に準じて「2ミリプラ板(1ミリプラ板の積層)」を切り出します。
そこに「黒のマジック」で色を塗っていきます。
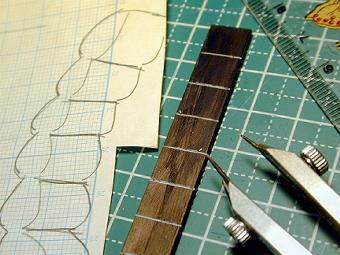
シグマの脚は節足動物の様な「節のある脚」で出来ています。
「台形状の節」の連続によって出来上がっているのです。
「プラ板」を紙やすりで削りそれを再現していくのですが、
こうして「黒いマジック」を塗っておくと
「どこをどこまで削って、どこをどこまで削っていないか」が
とても判断しやすいのです。
こうして「脚」の「原型」が出来上がりました。
これをまたキャストで複製していくのですが、
それにはちょっとした「技」を思いつき、試してみました。
「技」ってほどでもないのですが。
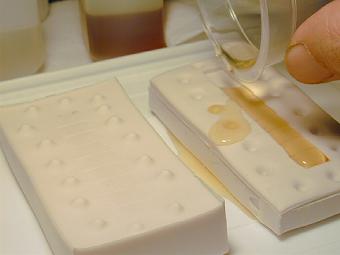
まずシリコン型にキャストを流した後、
二つの「型」を合わせます。
ちなみにこれは「タイヤキ方式」と呼ばれる型取り方法で、
ここまでは別に「技」ではありません。
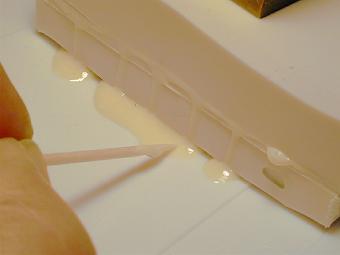
「技」はここからです。
型からはみ出たキャストを頻繁に「爪楊枝でツンツン」し、
キャストの硬化具合を見ていきます。
そしてキャストが
「手で触ってもカタチが崩れず、でもある程度まだ柔らかい」
状態になった瞬間、
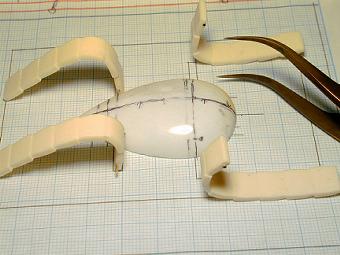
型からキャストを急いで取り出し、

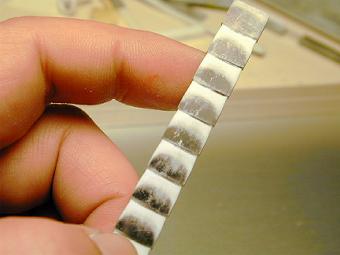
前もってプラ板で作っておいた「シグマの脚のガイド」に、
(写真は前脚用と後脚用)

キャストを押し付けて「曲がった脚のカタチ」を出していったのです。
(この際『節の上下』を間違えない様に注意します)
もちろんこの状態のまま「キャストが完全に硬化する」まで
押さえておかなければなりません。

キャストの硬化が進み過ぎると
曲げた時に「割れて」しまいますし、
反対に柔らかすぎると
せっかく作った「節の形状」が壊れてしまいます。
「キャストの微妙な硬化状態」を判断するのが
少し難しいかも知れません。
ちなみに今回のこの方法を私は
「キャストが微妙な硬化状態の時に無理矢理形状を変える工法」
と名付けたいと思います。
まんまですが。
というか、このやり方はすでにあるのかしら?
こうして一個の「原型」から
前脚用の2本、後脚用の2本の合計4つの「脚」が出来ました。
次に設計図と照らし合わせながら、
取り付け位置を慎重に決めて
「胴体」へと繋げていきます。
「脚の根元」には「内径0,93ミリの真鍮パイプ」を埋め込み、、
「0,8ミリ真鍮線」で胴体を貫通させて繋げました。
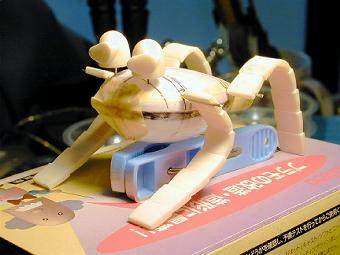
ようやく
シグマの全体像が見えてきました。
つづきます。
前のページへ 次のページへ
トップページへ
 |
ご意見、ご感想はこちらまで |