モリアーティの潜航艇製作記
(中編)
(3/7)

探していたパーツを購入して来たので、

ようやく「マニピュレーター」の先端、
「ハサミ手」を作っていきました。
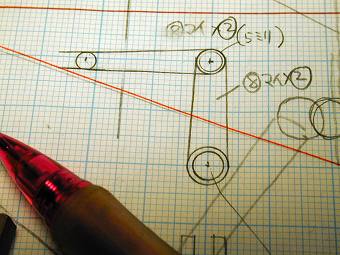
簡単な設計図から必要なパーツのサイズと数を割り出して、
ディバイダーと「針」を噛ませたピンバイスを使い、
1ミリプラ板へと展開していきました。

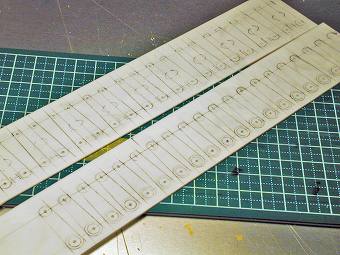
私にとっては「気が遠くなる」ほど
大量の同型パーツになりました…。
パーツには「可動」させるため穴を空けておきましたので、
そこに「1ミリ真鍮棒」を貫通させ、
同じパーツをまとめて一気に整形していきました。

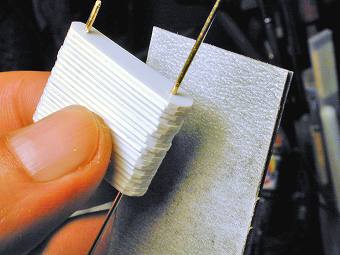
ここまでパーツの数が増えたのも、
1ミリプラ板を「積層」して「2ミリ厚」にしようとしたためであります。
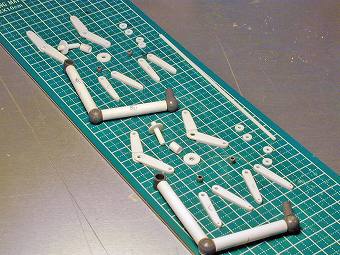
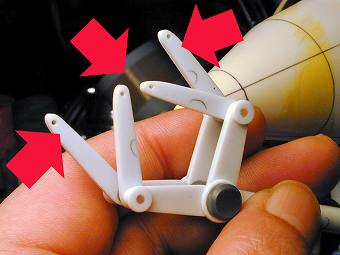
さらにアーム先端の「T字ジョイント」を挟み込む様に
2本の「基節指」があり、さらにそれが上下に分かれ、
その先にそれぞれ「末節指」が付くのであります。
これだけでも「片手」分。
何でこんな面倒な構造にしちゃったかなぁ、
と気づいた時には後の祭りなのであります。

組み立てていきます。

パーツをプラ板から切り出して整形するのは
メチャクチャ大変なのですが、
組み立てるのはとても楽しいのであります。
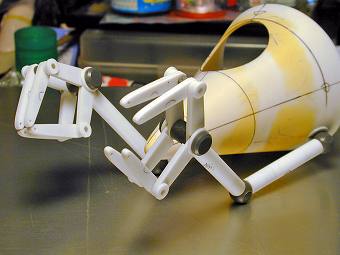
出来ました。
「艦首マニピュレーター」であります。
この「マニピュレーター(マジックハンド)(ロボットアーム)」は、
実に初期の「宮崎メカ」チックです。
いや、
「宮崎メカ」チックと言うよりも、
初期の「東映動画SFメカ」の「由緒正しい系譜」を
感じさせるのであります。
何より凄いのは、これ劇中、
「艦首」に常設されているのではなく、
必要に応じてニョキニョキと中から伸びてくるのであります。
さすが悪の天才「モ」(以下略)。
マニピュレーターの「末節指」は先端でまとめず、
別々に可動する様にしました。
これによりコイツは、
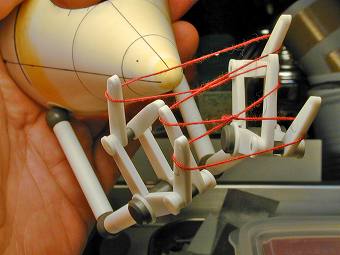
「あやとり」だって出来るのであります。
冗談です。
つづきます。
前のページへ 次のページへ
トップページへ
 |
ご意見、ご感想はこちらまで |